0x00
下面介绍人体感应模块 HC-SR501。
其中 PDF 版本的详细说明参考 在这里, 本文参考于 arduino
0x01
 PS: 图片来自一个国外友人的 博客
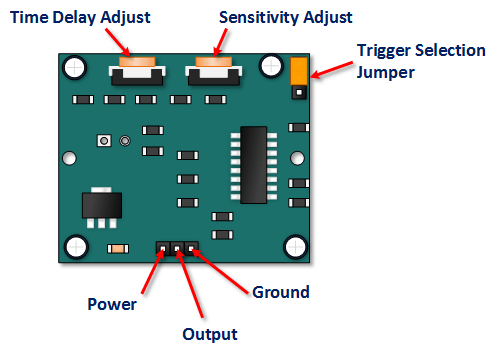
触发方式有两种, L是指一次触发之后就保持高电平到一个周期末,然后停止。H是指一次触发之后就保持高电平,如果人还在感应范围内就保持高电平不变化直到人离开感应范围。更改触发方式通过修改跳线的连接来实现。
PS:感应的时候输出高电平。
PS: 图片来自一个国外友人的 博客
触发方式有两种, L是指一次触发之后就保持高电平到一个周期末,然后停止。H是指一次触发之后就保持高电平,如果人还在感应范围内就保持高电平不变化直到人离开感应范围。更改触发方式通过修改跳线的连接来实现。
PS:感应的时候输出高电平。
上面有两个旋钮可以调节触发的灵敏度和触发的探测距离,距离在 7m以内。 在输出高电平之后会有0.2s的封锁时间,不响应探测。
0x02
Python 驱动树莓派工作:
- 树莓派的GPIO口的编号有两种方式,一种是按照从左到右,从上到下。开始的第一个引脚叫做
pin 1,最后一个叫做pin 40。 这种编号方式叫做 BOARD, 另外一种方式是按照每个引脚的功能来的,叫做BCM。
 PS: 图片出处见水印
PS: 图片出处见水印
- 在代码开始前需要通过
GPIO.setmode(GPIO.BCM)来声明你是怎样使用它的引脚的。我偏向于BOARD这种方式,因为简单粗暴。 - 如果GPIO在另外一个脚本里面使用了,那么他会出警告,我们可以设置一下
GPIO.setwarings(False)来禁用他。 - 我们 需要制定用到的每一个引脚的功能,酱紫
GPIO.setup(17, GPIO.IN), 其中17是引脚的BCM编号,或者酱紫GPIO.setup(17, GPIO.OUT, initial=GPIO.HIGH),其中最后的initial=GPIO.HIGH缺省,用来指定引脚的初始的电平。 - 读取引脚的状态可以
GPIO.input(17), 返回值是0,1,GPIO.LOW, GPIO.HIGH, True, False - 设置引脚的输出状态可以酱紫
GPIO.output(17,GPIO.HIGH). -
脚本结束后务必清理一下GPIO的状态为输入,避免短路
GPIO.cleanup() - 把 HC-SR501的有引脚的那面靠近自己,灵敏度调节的朝上,那么左边的那个引脚是 VCC,右边的是 GND, 中间的是OUTPUT
0x03
这次试验中我用的BOARD方式编码的7号引脚,GND接的34号,VCC接的2号。参考的官方给的PDF,模块需要的电压是5v-20v
0x04
我写的python 代码如下,很简短,不过是我第一次尝试这个模块:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
#!/usr/bin/python
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BOARD)
GPIO.setwarnings(False)
GPIO.setup(7, GPIO.IN) # Here I use Pin 7 connect to OUTPUT of the sensor.
try:
print("Init....")
while True:
if (GPIO.input(7)):
print("Somebody here.")
time.sleep(1)
except KeyboardInterrupt: #capture the Ctrl+c, before it exit, I clean the GPIO
GPIO.cleanup()
print("User aboard.")
0x05
后记:
这个模块很不稳,输出不止探测到人,也会出错,对着我的脸的时候不停的给信号,说明探测断断续续,我是把他放置到L模式,他是探测到人就持续输出高电平,探测不到就低电平。
模块是探测指定波段的红外线,这个波段的红外线主要是人类的体温发出的波段,如果将菲涅尔透镜朝向温度和人体差不多的东西,比如我正在工作的显示器,他也会以为那里有人,从而发出高电平。
附上两张工作的照片。
 以及树莓派的照片
以及树莓派的照片
